

船舶爬壁機器人吸附技術及其應用分析
時間:2022-12-02 15:54:00作者:LeeZhou來源:德(dé)高潔清潔設備
隨著科學技術的發展,爬壁機器人的應用呈現“井噴式增長”形勢,其主要用於(yú)代替人工勞動完(wán)成危險、繁複、惡劣環境的工作,尤其實(shí)在船舶外壁的除鏽清洗(xǐ)中優勢更為突出。船用爬壁機器人與陸(lù)地機器人的不同之處在於其對吸(xī)附能力的需求,這也造就了其是移動機構與吸附機構強耦合的機器體。
由於船(chuán)舶爬壁機器人,需要(yào)搭載清(qīng)洗、除鏽、除漆等裝置在船舶(bó)曲麵(miàn)進(jìn)行作(zuò)業,所以避免出現(xiàn)脫落狀況,船舶爬壁機器人需要具備較強的吸附能力,目前,船(chuán)舶領域中,爬壁機器人大多(duō)采用(yòng)負壓吸附技術、螺旋槳吸附、磁吸附技術,這三種吸附技術的吸(xī)附能力較大,能(néng)夠支(zhī)撐爬壁機器人完成作業任務(wù),但存在著吸附機構與(yǔ)移動機構強耦合、吸附力難以調節、越障能力弱(ruò)等問題。
一、負壓吸附技術
低真空度負壓吸附采用風(fēng)機旋轉將負壓腔內的(de)空氣(qì)抽出產生負壓來吸附,具有一定的壁麵適應能力,但存在噪音大、體積大的缺(quē)點,高真(zhēn)空(kōng)度負壓吸附方式則由真空泵在真(zhēn)空吸盤內(nèi)產生一定真空度,其(qí)具有噪音較小、易於小型化集成的優(yōu)點,但對壁麵的光潔(jié)度及透(tòu)氣性有較高要求,而(ér)需要清洗作業的船舶壁麵多存在凹凸不平,具有(yǒu)焊縫、舊漆層等工況,所以(yǐ)這種吸附方式受限。
二、螺旋槳吸附技術
螺旋槳吸(xī)附又名旋翼吸附、推力吸附、正壓吸(xī)附,靠(kào)合理布置螺旋槳的角度,利用螺旋槳旋轉產生的推力將機(jī)器人貼附在(zài)壁麵(miàn)上,這種雖然方式結構比(bǐ)較簡單,但效率低下,工作噪音大,比較容易受(shòu)到外界的影響的缺點。
三、磁吸附技術
磁吸附式爬壁機器人被廣泛應用於各行(háng)各(gè)業,以在人工不易到達的地方進行勘測、清掃等工作,磁(cí)吸(xī)附技術的應用較晚於負(fù)壓吸附技術(shù),但其在兼具船舶壁麵吸附能力的同時,具(jù)備較強的負載能力,相較於負壓吸附技術,磁吸附技術(shù)對船舶壁麵的光潔度要求(qiú)不高,不會因為(wéi)壁麵不平而泄壓現象,因此如果壁麵是導磁材(cái)料便優先考慮磁(cí)吸附(fù)方式。目前采用磁(cí)吸附技術的爬壁機器(qì)人主要可以分為(wéi)履帶式磁吸附爬(pá)壁機器人、輪式磁吸附爬壁機器(qì)人兩大類。
1、履帶式爬壁機器人

主要(yào)有履(lǚ)帶和磁塊、履帶和磁體兩種形式,其區別在於一種是磁塊安裝於機身底部用於吸附,履帶用於行走;另一種磁(cí)體等間(jiān)距安(ān)裝於履帶之上(shàng),伴(bàn)隨履帶同速轉動,履帶與磁體合為一體,兼具行走和吸附功能。履帶式磁吸附爬壁機器人能充分與壁麵接觸,可以提供(gòng)足(zú)夠大的吸附力,壁麵適應性較(jiào)強,缺點是不靈活,不易轉彎,且需要比(bǐ)較大的驅動力,存在吸附機構與移動機構(gòu)強耦合、吸附力難以調節等問題。
2、輪式磁吸(xī)附爬壁機(jī)器人

車輪和磁塊組合、磁輪兩種形式,車輪和(hé)磁塊組合個體(tǐ)較大的磁塊安裝於機身底部用於吸附,車輪用於行走和轉向;磁輪的方式是車(chē)輪本身由磁鐵製作而具有吸(xī)附力,但(dàn)磁輪與壁(bì)麵的接觸麵小,吸附力不足,往往在機身底(dǐ)部配有磁塊。輪式磁吸附爬壁機器人具有速度快,運動靈活,工(gōng)作方式簡單,實用(yòng)化(huà)程(chéng)度高等優點,在船舶表麵除鏽清洗中得到越來越廣泛的運用。由(yóu)於輪式磁吸附爬壁(bì)機器人(rén)主要工作環境大多處於危險壁麵,提(tí)高(gāo)其穩定性是重中之(zhī)重。
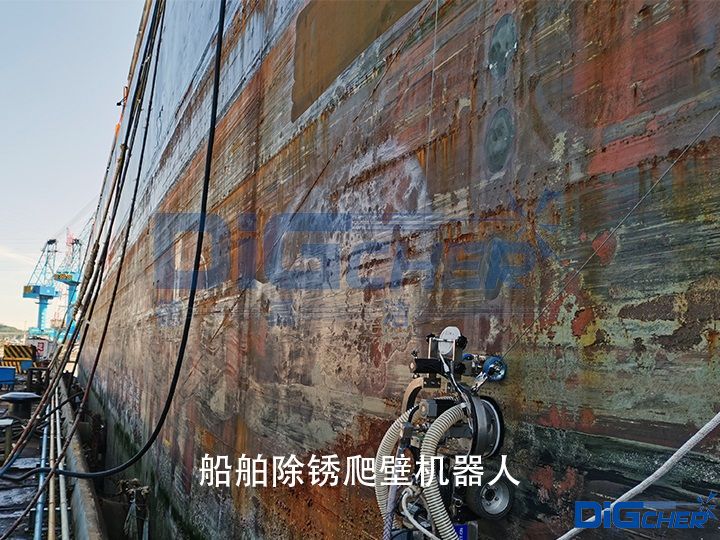
針對輪式磁吸附爬壁(bì)機器人,國內德高潔自主(zhǔ)研發(fā)並(bìng)投入(rù)使用了一款輪式磁吸附爬壁機器(qì)人,機器人附壁行走能力強,牢牢吸附在船體表(biǎo)麵進行作業,並具備一定的曲麵越障能力(lì);采用四驅(qū)越野底盤(pán)輪式驅動,保障機器人運行(háng)的穩定(dìng)性;可(kě)承受200kg負載,能(néng)夠在280MPa的水壓衝擊力下進行除(chú)鏽作業;搭配超高壓水除鏽機構,能夠高效率高質量的完成作業,除漆(qī)效率可(kě)達到70m²/h,除鏽清潔度(dù)恢複Sa2.5,可在極端天氣下對船(chuán)舶外壁進行清潔工作,適用於大型船舶(bó)維護工(gōng)作。
不僅如此,德高(gāo)潔船舶爬壁機器人作業過程(chéng)中,真空係統吸附排(pái)渣,將除鏽過程中(zhōng)的漆渣(zhā)鏽(xiù)渣、廢水進行分別回收到地麵進(jìn)行處理,整個工作工程中幾(jǐ)乎看不見水,能夠很好的(de)解決傳統高壓水爬壁機器人作業時(shí)的返鏽現(xiàn)象,機器人自動控製、操作簡單,工作時僅需一(yī)台氣動控製器即可輕鬆操(cāo)作(zuò)機器人在船體外立麵上X、Y方向任意行走作業。
德高潔作為一(yī)家專業清潔環保設備供應商,在環(huán)保除塵、高壓水(shuǐ)射流清技術、淨化成套裝(zhuāng)備、工業設備清潔領域已積累(lèi)了近三十年的業內寶貴經驗,自2015年便聚焦智能(néng)化、數控化、機器人化工業清洗技術的研究,其中德高潔爬壁機器人設備采用負壓原理,吸附可靠;爬高能力強,移動(dòng)速度快,反(fǎn)應靈活;遙控操作,簡單方便。除此之外,德高(gāo)潔爬壁機器人采用多元化搭載模式,可同時搭(dā)載(zǎi)清洗、除漆除鏽、噴塗機構(gòu),滿足船體除漆除鏽、海生物附著物進行清理、船體自(zì)動噴塗作業,有效提高船舶修(xiū)造行(háng)業的經濟(jì)效益,為船舶修造行業發展助力。
由於船(chuán)舶爬壁機器人,需要(yào)搭載清(qīng)洗、除鏽、除漆等裝置在船舶(bó)曲麵(miàn)進(jìn)行作(zuò)業,所以避免出現(xiàn)脫落狀況,船舶爬壁機器人需要具備較強的吸附能力,目前,船(chuán)舶領域中,爬壁機器人大多(duō)采用(yòng)負壓吸附技術、螺旋槳吸附、磁吸附技術,這三種吸附技術的吸(xī)附能力較大,能(néng)夠支(zhī)撐爬壁機器人完成作業任務(wù),但存在著吸附機構與(yǔ)移動機構強耦合、吸附力難以調節、越障能力弱(ruò)等問題。
一、負壓吸附技術
低真空度負壓吸附采用風(fēng)機旋轉將負壓腔內的(de)空氣(qì)抽出產生負壓來吸附,具有一定的壁麵適應能力,但存在噪音大、體積大的缺(quē)點,高真(zhēn)空(kōng)度負壓吸附方式則由真空泵在真(zhēn)空吸盤內(nèi)產生一定真空度,其(qí)具有噪音較小、易於小型化集成的優(yōu)點,但對壁麵的光潔(jié)度及透(tòu)氣性有較高要求,而(ér)需要清洗作業的船舶壁麵多存在凹凸不平,具有(yǒu)焊縫、舊漆層等工況,所以(yǐ)這種吸附方式受限。
二、螺旋槳吸附技術
螺旋槳吸(xī)附又名旋翼吸附、推力吸附、正壓吸(xī)附,靠(kào)合理布置螺旋槳的角度,利用螺旋槳旋轉產生的推力將機(jī)器人貼附在(zài)壁麵(miàn)上,這種雖然方式結構比(bǐ)較簡單,但效率低下,工作噪音大,比較容易受(shòu)到外界的影響的缺點。
三、磁吸附技術
磁吸附式爬壁機器人被廣泛應用於各行(háng)各(gè)業,以在人工不易到達的地方進行勘測、清掃等工作,磁(cí)吸(xī)附技術的應用較晚於負(fù)壓吸附技術(shù),但其在兼具船舶壁麵吸附能力的同時,具(jù)備較強的負載能力,相較於負壓吸附技術,磁吸附技術(shù)對船舶壁麵的光潔度要求(qiú)不高,不會因為(wéi)壁麵不平而泄壓現象,因此如果壁麵是導磁材(cái)料便優先考慮磁(cí)吸附(fù)方式。目前采用磁(cí)吸附技術的爬壁機器(qì)人主要可以分為(wéi)履帶式磁吸附爬(pá)壁機器人、輪式磁吸附爬壁機器(qì)人兩大類。
1、履帶式爬壁機器人
主要(yào)有履(lǚ)帶和磁塊、履帶和磁體兩種形式,其區別在於一種是磁塊安裝於機身底部用於吸附,履帶用於行走;另一種磁(cí)體等間(jiān)距安(ān)裝於履帶之上(shàng),伴(bàn)隨履帶同速轉動,履帶與磁體合為一體,兼具行走和吸附功能。履帶式磁吸附爬壁機器人能充分與壁麵接觸,可以提供(gòng)足(zú)夠大的吸附力,壁麵適應性較(jiào)強,缺點是不靈活,不易轉彎,且需要比(bǐ)較大的驅動力,存在吸附機構與移動機構(gòu)強耦合、吸附力難以調節等問題。
2、輪式磁吸(xī)附爬壁機(jī)器人
車輪和磁塊組合、磁輪兩種形式,車輪和(hé)磁塊組合個體(tǐ)較大的磁塊安裝於機身底部用於吸附,車輪用於行走和轉向;磁輪的方式是車(chē)輪本身由磁鐵製作而具有吸(xī)附力,但(dàn)磁輪與壁(bì)麵的接觸麵小,吸附力不足,往往在機身底(dǐ)部配有磁塊。輪式磁吸附爬壁機器人具有速度快,運動靈活,工(gōng)作方式簡單,實用(yòng)化(huà)程(chéng)度高等優點,在船舶表麵除鏽清洗中得到越來越廣泛的運用。由(yóu)於輪式磁吸附爬壁(bì)機器人(rén)主要工作環境大多處於危險壁麵,提(tí)高(gāo)其穩定性是重中之(zhī)重。
針對輪式磁吸附爬壁(bì)機器人,國內德高潔自主(zhǔ)研發(fā)並(bìng)投入(rù)使用了一款輪式磁吸附爬壁機器(qì)人,機器人附壁行走能力強,牢牢吸附在船體表(biǎo)麵進行作業,並具備一定的曲麵越障能力(lì);采用四驅(qū)越野底盤(pán)輪式驅動,保障機器人運行(háng)的穩定(dìng)性;可(kě)承受200kg負載,能(néng)夠在280MPa的水壓衝擊力下進行除(chú)鏽作業;搭配超高壓水除鏽機構,能夠高效率高質量的完成作業,除漆(qī)效率可(kě)達到70m²/h,除鏽清潔度(dù)恢複Sa2.5,可在極端天氣下對船(chuán)舶外壁進行清潔工作,適用於大型船舶(bó)維護工(gōng)作。
不僅如此,德高(gāo)潔船舶爬壁機器人作業過程(chéng)中,真空係統吸附排(pái)渣,將除鏽過程中(zhōng)的漆渣(zhā)鏽(xiù)渣、廢水進行分別回收到地麵進(jìn)行處理,整個工作工程中幾(jǐ)乎看不見水,能夠很好的(de)解決傳統高壓水爬壁機器人作業時(shí)的返鏽現(xiàn)象,機器人自動控製、操作簡單,工作時僅需一(yī)台氣動控製器即可輕鬆操(cāo)作(zuò)機器人在船體外立麵上X、Y方向任意行走作業。
德高潔作為一(yī)家專業清潔環保設備供應商,在環(huán)保除塵、高壓水(shuǐ)射流清技術、淨化成套裝(zhuāng)備、工業設備清潔領域已積累(lèi)了近三十年的業內寶貴經驗,自2015年便聚焦智能(néng)化、數控化、機器人化工業清洗技術的研究,其中德高潔爬壁機器人設備采用負壓原理,吸附可靠;爬高能力強,移動(dòng)速度快,反(fǎn)應靈活;遙控操作,簡單方便。除此之外,德高(gāo)潔爬壁機器人采用多元化搭載模式,可同時搭(dā)載(zǎi)清洗、除漆除鏽、噴塗機構(gòu),滿足船體除漆除鏽、海生物附著物進行清理、船體自(zì)動噴塗作業,有效提高船舶修(xiū)造行(háng)業的經濟(jì)效益,為船舶修造行業發展助力。
熱門搜索:
